Home
Experience
Projects
Publications
Posts
Contact
CV
Light
Dark
Automatic
Computer Graphics
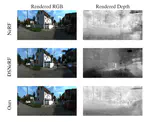
Lidar Constraint NeRF on Outdoor Scenes
Utilized Lidar as an additional depth constraint for Neural Radiance Fields (NeRF) on outdoor scenes, expanding the field of view and improving scene understanding in autonomous driving applications.
Cite
×