Home
Experience
Projects
Publications
Posts
Contact
CV
Light
Dark
Automatic
Computer Vision
6G Digital Twin: Handover Prediction
This project aims to develop a 6G Digital Twin for handover prediction by constructing a detailed digital replica of a scene using LIDAR scans, and employing sophisticated scene understanding methods to enhance the accuracy and efficiency of digital twins in 6G networks.
End-to-end Holistic 3D Scene Understanding with Attention
Developed an advanced system for holistic 3D scene understanding from a single RGB image, using attention mechanisms to accurately predict object shapes, poses, and room layout.
3D Object Part Segmentation with Self-supervised Learning
Validated the effectiveness of self-supervised learning in achieving state-of-the-art results with limited label availability, revolutionizing the approach to 3D object part segmentation.
Weakly-supervised Semantic Segmentation through Projective Cycle-consistency
Employed self-supervised segmentation techniques to autonomously learn intricate scene understanding tasks with limited annotations, specifically in medical contexts such as surgical operating rooms.
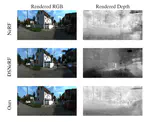
Lidar Constraint NeRF on Outdoor Scenes
Utilized Lidar as an additional depth constraint for Neural Radiance Fields (NeRF) on outdoor scenes, expanding the field of view and improving scene understanding in autonomous driving applications.
Exploiting Multi-Modality Context for Enhanced Online Adaptive Pseudo-Labeling of Point Clouds
This thesis addresses the challenge of weakly supervised point cloud semantic segmentation by leveraging multi-modal information and introducing novel pseudo-labeling techniques.
Mert Kıray
PDF
Cite
Dataset
Cite
×