Mert Kıray
Computer Vision & Deep Learning Researcher
About Me
I am Mert Kiray, a dynamic figure in the realms of computer vision, deep learning, and software engineering. I hold a Bachelor of Science in Computer Engineering from Koç University, Istanbul, and a Master of Science in Informatics from the Technical University of Munich, where I distinguished myself academically
Professionally, I have taken on significant roles such as a Computer Vision Student Researcher at TUM, delving into contrastive learning methods using point clouds. As a Co-Founder and CTO at Octovan, I led teams and spearheaded technology decisions, creating a resilient API backend with Spring Boot and Hibernate. In another entrepreneurial venture as Co-Founder and AI Researcher at Jigglypop, I was at the forefront of predicting customer actions through deep learning techniques.
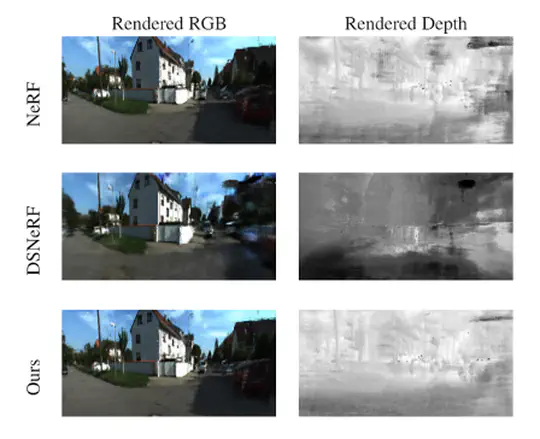
My master’s thesis and various projects reflect my expertise in integrating multi-modality context and self-supervised learning to advance 3D computer vision technologies with applications from autonomous vehicles to medical diagnostics.
With my proficiency in languages like Python, Java, and C/C++, and in using frameworks such as PyTorch, NumPy, and AWS, I have positioned myself as a thought leader and innovator at the intersection of computer vision and deep learning. My contributions have furthered academic research and led to tangible technological advancements in multiple sectors.
- Computer Vision
- Deep Learning
- Machine Learning
- Software Engineering
- Cloud Computing
M.Sc. in Computer Science, 2023
Technical University of Munich
B.Sc. in Computer Engineering, 2018
Koç University
Experience
- Worked as a research assistant in the 6G digital twin project at the Chair of Media Technology at TUM.
- Conducted research on different contrastive learning methodologies on point clouds for different downstream tasks.
- As CTO, orchestrated developer teams and technology selection.
- Created a resilient API backend from scratch using Spring Boot and Hibernate.
- Engineered AWS-based infrastructure with EC2, S3, ECS, and Lambda services.
- Created a customer action prediction using seq2seq approach in Python with PyTorch.
- Helped students to solve their questions about mobile device programming codes and graded projects.
- Developed machine learning packages for a robotic arm.
Projects