Lidar Constraint NeRF on Outdoor Scenes
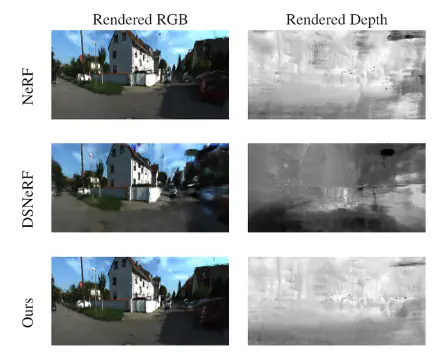
This project focused on enhancing Neural Radiance Fields (NeRF) for outdoor scenes, specifically for autonomous driving applications, by integrating Lidar data as an additional depth constraint. This integration aimed to broaden the field of view and improve scene understanding, crucial elements in autonomous driving. By leveraging Lidar’s ability to accurately measure distances, the project aimed to overcome some of the limitations of traditional NeRF systems in handling complex outdoor environments. The enhanced scene understanding capabilities developed through this approach are expected to contribute significantly to the safety and efficiency of autonomous driving technologies.
Mert Kıray
Computer Vision & Deep Learning Researcher
Experienced with Python & Pytorch Pixel enthusiast, passionate about Computer Vision & Deep Learning